¡Tu carrito está actualmente vacío!
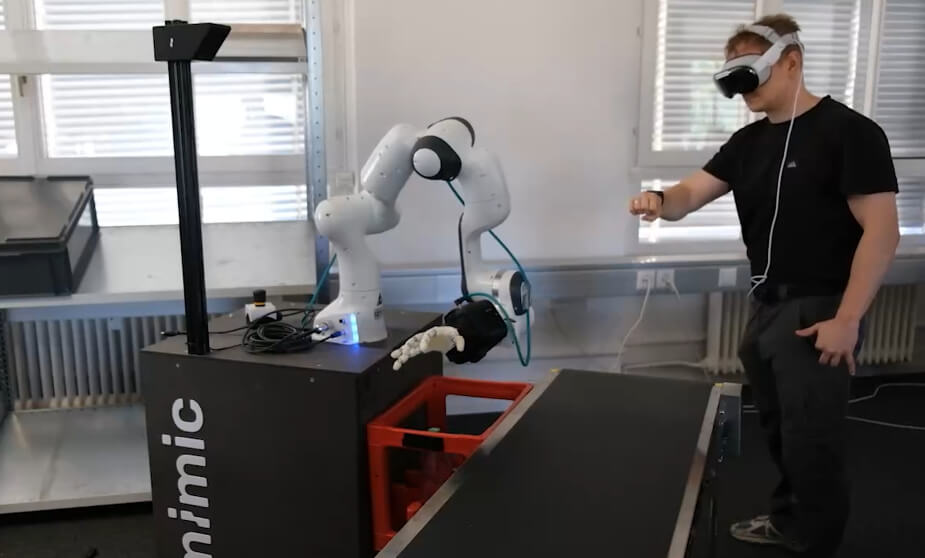
Investigadores del Centro de IA y el Laboratorio de Robótica Suave de ETH Zúrich han presentado Mimic-One, un sistema avanzado que impulsa la manipulación robótica de propósito general.
El proyecto combina hardware de última generación con un modelo de difusión escalable, capaz de controlar de forma precisa una mano robótica humanoide en situaciones reales.
La plataforma integra una mano de 16 grados de libertad impulsada por tendones, con cámaras de gran angular en la muñeca, montada sobre un brazo robótico Franka Emika Panda.
A esto se suma una interfaz de teleoperación que emplea guantes y realidad virtual para recopilar datos de alta calidad en tareas como clasificación, ensamblaje y manipulación precisa de objetos.
Aprendizaje autónomo y adaptativo
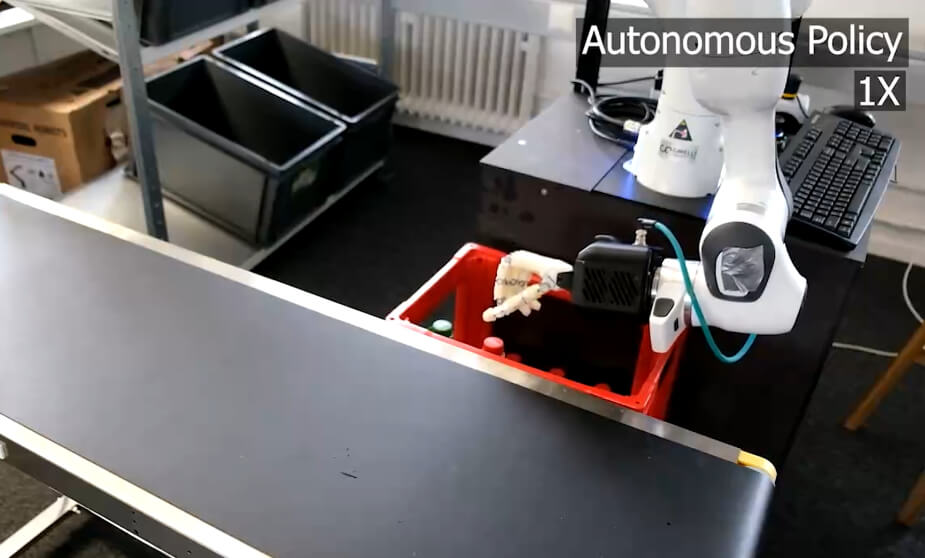
El modelo se entrena utilizando control generativo de alta frecuencia, a partir de información sensorial sin procesar.
Mimic-One recrea acciones motoras finas con movimientos suaves y capacidad de autocorrección, lo que resulta clave en escenarios complejos.
Durante las pruebas, el sistema alcanzó una tasa de éxito del 93,3 % en tareas de distribución, con mejoras de hasta un 33,3 % gracias a la aparición de comportamientos autocorrectivos. Los avances reflejan una mejora significativa frente a enfoques anteriores, particularmente en entornos no controlados.
Un enfoque integral en diseño y despliegue
La arquitectura del modelo está basada en políticas de difusión, optimizadas para representar eficazmente estados y acciones.
Traduciéndose en un rendimiento más ágil y generalizable frente a distintas tareas.
La integración entre el diseño físico, el aprendizaje automático y la aplicación práctica es uno de los pilares del éxito de Mimic-One.
Este proyecto no solo avanza el estado del arte en la robótica diestra, sino que sienta las bases para futuras aplicaciones industriales y asistenciales, donde la precisión, la adaptabilidad y la autonomía resultan esenciales.
Mimic-One abre el camino hacia robots que manipulan con la agilidad y sensibilidad propias de la mano humana.
Tagged in :
Más entradas

IA y NASA: Predicción de eventos solares
.
La inteligencia artificial ayuda a predecir eventos solares y proteger satélites de posibles interrupciones.

Google renueva Play Store con IA y nuevas funciones
.
Google anunció una importante actualización de su Play Store, orientada a mejorar la interacción de sus más de 4 mil millones…

Meta lanza Hyperscape convirtiendo espacios en mundos virtuales
.
En Meta Connect, la compañía de Mark Zuckerberg presentó varias actualizaciones sobre el metaverso, resaltando el lanzamiento de Hyperscape.