¡Tu carrito está actualmente vacío!
Reachy 2 es el primer robot humanoide completamente de código abierto, diseñado para facilitar el desarrollo de inteligencia artificial y aplicaciones en el mundo real.
Este innovador robot puede ser teleoperado o controlado mediante Python, y utiliza el sistema operativo ROS2 Foxy, lo que permite a los desarrolladores experimentar y crear fácilmente prototipos.
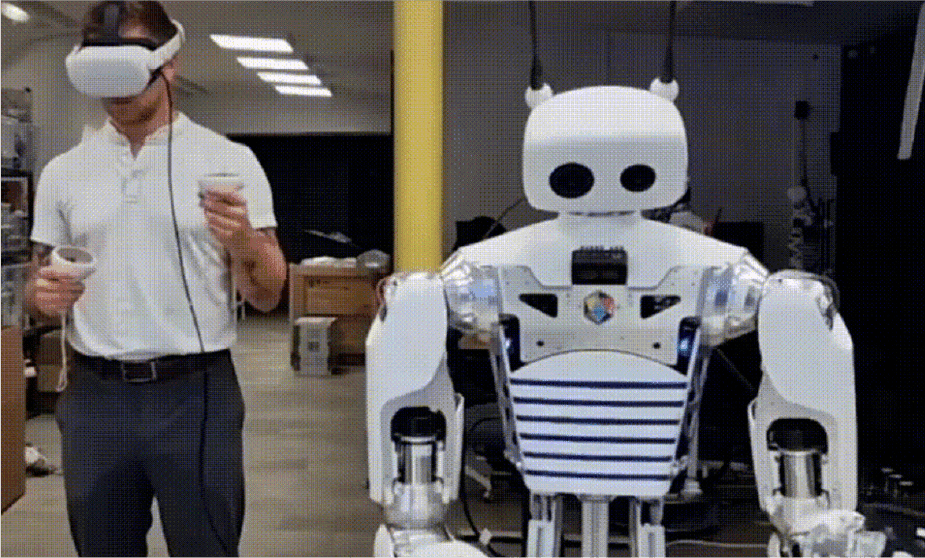
Control remoto y teleoperación en VR
La manipulación de objetos en el mundo real es uno de los mayores desafíos para los robots, y Reachy 2 lo enfrenta con una solución innovadora.
Gracias a su aplicación de teleoperación en realidad virtual (VR), los usuarios pueden tomar el control remoto del robot, mover sus brazos, manos y cabeza.
Además, es posible ver a través de las cámaras de Reachy para interactuar con el entorno, ya sea en una oficina, hogar, hospital o tienda.
Brazos robóticos avanzados
Equipado con brazos modulares de 7 grados de libertad (DOFs), Reachy 2 tiene una estructura similar a la de un brazo humano adulto, capaz de levantar objetos de hasta 3 kg y manipularlos con destreza.
Reachy está diseñado para aprender y mejorar continuamente en la interacción con el entorno físico.
Navegación y aprendizaje automático
Con tres ruedas omnidireccionales y múltiples sensores, Reachy 2 ofrece una movilidad fluida y adaptable.
También su sistema alimentado por CPU proporciona todas las herramientas necesarias para el aprendizaje automático, compatible con los marcos modernos de IA.
Reachy 2 permite a los desarrolladores explorar nuevos modelos de aprendizaje y desplegarlos de manera eficiente, haciendo que la robótica y la IA sean accesibles para una amplia gama de aplicaciones.
Tagged in :
Más entradas

IA y NASA: Predicción de eventos solares
.
La inteligencia artificial ayuda a predecir eventos solares y proteger satélites de posibles interrupciones.

Google renueva Play Store con IA y nuevas funciones
.
Google anunció una importante actualización de su Play Store, orientada a mejorar la interacción de sus más de 4 mil millones…

Meta lanza Hyperscape convirtiendo espacios en mundos virtuales
.
En Meta Connect, la compañía de Mark Zuckerberg presentó varias actualizaciones sobre el metaverso, resaltando el lanzamiento de Hyperscape.