¡Tu carrito está actualmente vacío!
Los robots del tamaño de un insecto representan una alternativa para tareas de búsqueda y rescate, así como para la inspección de infraestructuras en lugares de difícil acceso.
Sin embargo, los motores rígidos convencionales que suelen utilizar resultan poco prácticos a esa escala, ya que se rompen fácilmente o no generan la fuerza suficiente para superar la fricción.
Ante este desafío, investigadores de la Universidad de Westlake en Hangzhou, China, desarrollaron un sistema elastoelectromagnético inspirado en el funcionamiento de los músculos.
El mecanismo utiliza materiales flexibles y combina fuerzas magnéticas con un diseño estructural, evitando así el uso de estímulos agresivos como alto voltaje o intensos campos externos.
Tecnología de actuadores flexibles
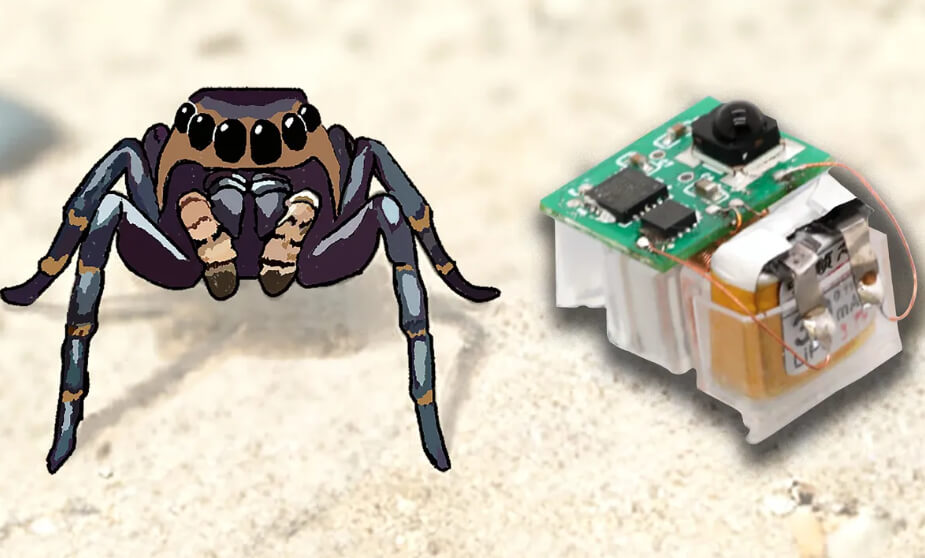
El nuevo actuador está compuesto por un polímero de silicona flexible (polidimetilsiloxano), un imán de neodimio y una bobina eléctrica entrelazada con esferas de hierro magnético blando.
El diseño permite la contracción similar a un músculo gracias al equilibrio entre fuerzas elásticas y magnéticas.
Al activarse, genera una corriente que produce una fuerza de Lorentz, deformando el sistema y proporcionando movimiento al robot.
El actuador puede contraerse hasta un 60 %, funciona con menos de 4 voltios y es alimentado por baterías integradas.
Aparte, mantiene estabilidad sin requerir energía continua, imitando la eficiencia de ciertos músculos animales que conservan energía durante largos periodos.
Robots insecto blandos en acción
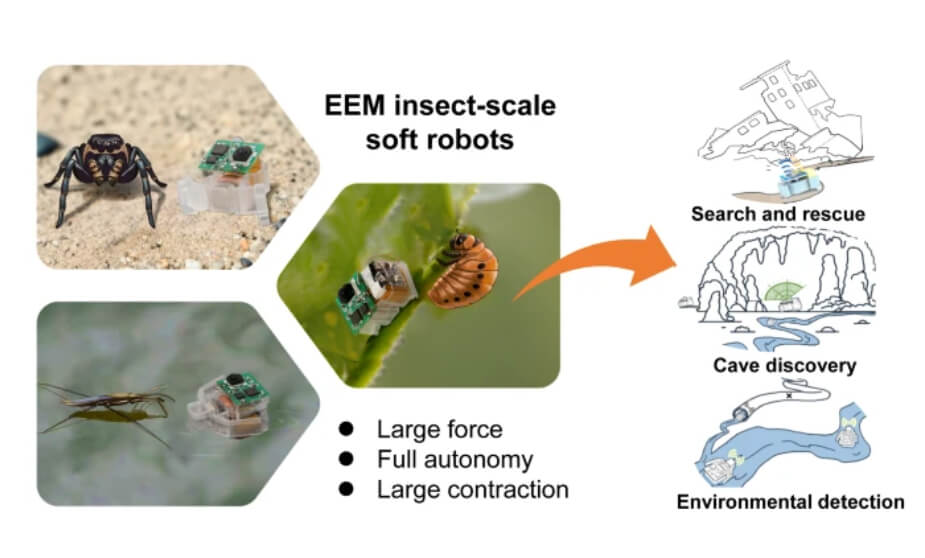
Con esta tecnología, los científicos construyeron robots blandos del tamaño de insectos capaces de gatear, nadar y saltar en distintos entornos.
Un ejemplo es el robot gusano medidor de apenas 1,8 gramos y 16 x 10 x 10 mm, que se desplaza por contracciones sucesivas similares a una oruga.
Pese a su tamaño, es de 8 a 45 veces más potente que otros robots de su escala, pudiendo avanzar en superficies como tierra, vidrio, madera o pendientes de hasta 15 grados. Incluso resistió caídas de 30 metros sin sufrir daños.
Otros diseños incluyen un robot con patas de 1,9 g que imita el movimiento de una oruga y un robot nadador de 2,2 g, probado en laboratorio y en un río para tareas de detección química.
Inspiración en los músculos
El equipo liderado por Hanqing Jiang planea desarrollar enjambres de robots equipados con sensores capaces de tomar decisiones colectivas y cubrir áreas extensas.
También, estudian nuevas formas de movimiento, como el vuelo y la natación en aguas profundas, con el objetivo de crear robots blandos similares a medusas para la exploración marina.
Con información de EEE Spectrum.
Tagged in :
Más entradas

IA y NASA: Predicción de eventos solares
.
La inteligencia artificial ayuda a predecir eventos solares y proteger satélites de posibles interrupciones.

Google renueva Play Store con IA y nuevas funciones
.
Google anunció una importante actualización de su Play Store, orientada a mejorar la interacción de sus más de 4 mil millones…

Meta lanza Hyperscape convirtiendo espacios en mundos virtuales
.
En Meta Connect, la compañía de Mark Zuckerberg presentó varias actualizaciones sobre el metaverso, resaltando el lanzamiento de Hyperscape.