¡Tu carrito está actualmente vacío!
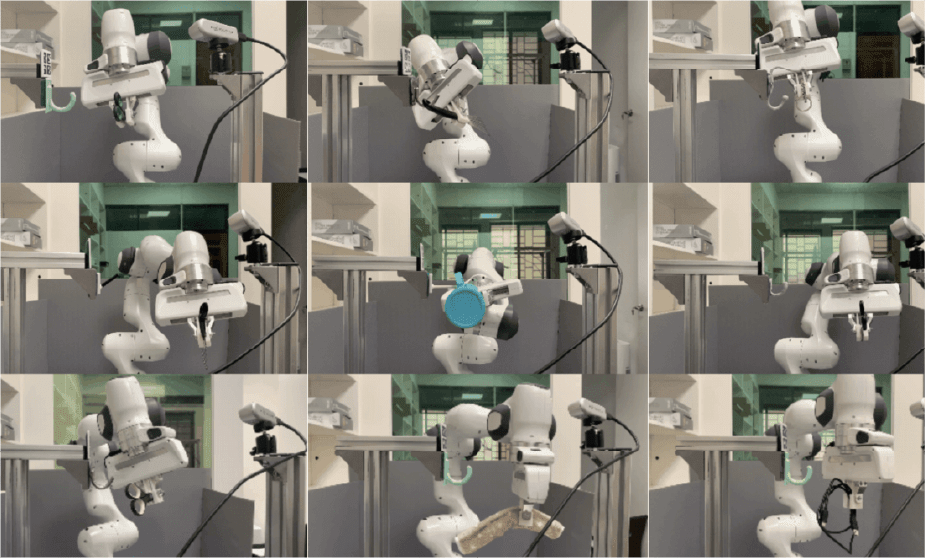
Durante el ICRA se discutieron avances en el campo de los tejidos geométricos, presentado por miembros del Laboratorio de Robótica de NVIDIA.
Durante la Conferencia Internacional IEEE sobre Robótica y Automatización (ICRA) celebrada del 13 al 17 de mayo en Yokohama, Japón, se discutieron numerosos avances en el campo de los tejidos geométricos.
Este tema fue uno de los siete artículos presentados por miembros del Laboratorio de Investigación de Robótica de NVIDIA y sus colaboradores.
¿Qué son los tejidos geométricos?
En robótica, las políticas de formación suelen ser aproximadas, lo que puede llevar a movimientos erráticos y colisiones.
Para mitigar esto, se implementan controladores de bajo nivel que interceptan y ajustan los comandos para adecuarlos al hardware.
NVIDIA ha vectorizado estos controladores utilizando sus herramientas de entrenamiento aceleradas por GPU, permitiendo su uso tanto en el entrenamiento como en la implementación, mejorando así la seguridad y eficacia del robot.
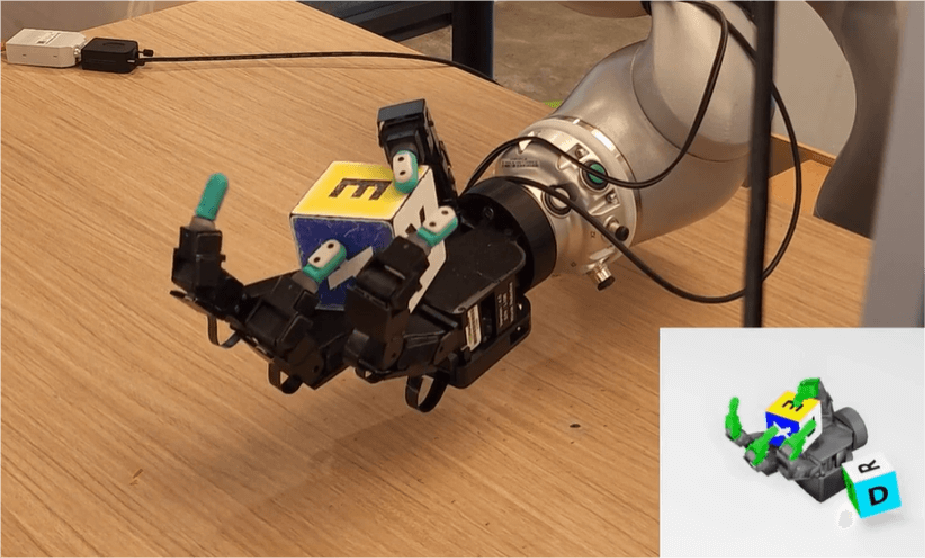
Políticas de DeXtreme
Este año, los investigadores de NVIDIA han fusionado las líneas de investigación de DeXtreme y los controladores de tela geométrica vectorizada.
El hallazgo ha permitido un entrenamiento más seguro y efectivo, acercando las herramientas de RL a entornos de producción.
La iteración rápida entre entrenamiento e implementación genera ajustes finos para robustecer el comportamiento del robot, evitando daños severos como en trabajos anteriores.
Más Investigación en Robótica en ICRA
SynH2R
El framework SynH2R propone generar movimientos de agarre humanos realistas para entrenar robots.
Fuera de la vista, todavía en la mente
El estudio RDMemory evalúa la reacción de un brazo robótico a objetos que se ocluyen de la vista, asegurando respuestas confiables en diversos entornos.
Modelos de mundos de nubes de puntos
El modelo PCWM mejora el rendimiento y la robustez de los robots en el aprendizaje visual.
SKT-Hang
SKT-Hang aborda el desafío de que un robot cuelgue diversos objetos en distintas estructuras, enfrentando las variaciones en formas y soportes.
Robots con precisión quirúrgica
ORBIT-Quirúrgico
El marco de simulación basado en la física y renderizado fotorrealista utiliza NVIDIA Isaac Sim para entrenar robots quirúrgicos, mejorando habilidades y procesando datos sintéticos realistas.
DefGoalNet
DefGoalNet se enfoca en el servo de formas, controlando objetos para crear formas específicas.
Socios de NVIDIA Robotics en ICRA
ANYbotics y Franka Robotics, entre otros, presentaron sus últimos desarrollos en la conferencia, destacando avances en controles de bajo nivel y sistemas de IA.
Con información de Nvidia Developer.
Tagged in :
Más entradas

IA y NASA: Predicción de eventos solares
.
La inteligencia artificial ayuda a predecir eventos solares y proteger satélites de posibles interrupciones.

Google renueva Play Store con IA y nuevas funciones
.
Google anunció una importante actualización de su Play Store, orientada a mejorar la interacción de sus más de 4 mil millones…

Meta lanza Hyperscape convirtiendo espacios en mundos virtuales
.
En Meta Connect, la compañía de Mark Zuckerberg presentó varias actualizaciones sobre el metaverso, resaltando el lanzamiento de Hyperscape.