¡Tu carrito está actualmente vacío!
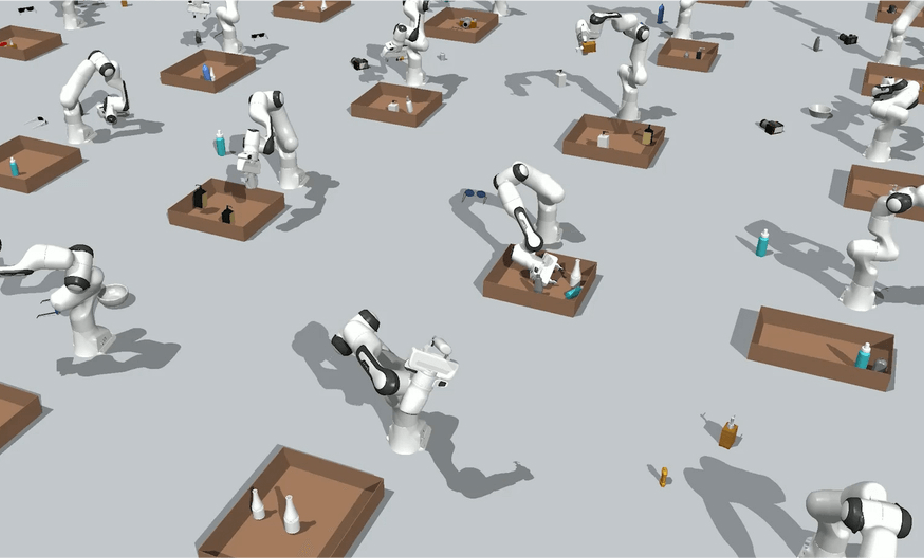
Cualquiera que haya intentado empacar una cantidad de equipaje de tamaño familiar en el maletero de un sedán sabe que este es un problema difícil. Los robots también tienen dificultades con las tareas de embalaje denso.
Para el robot, resolver el problema del embalaje implica satisfacer muchas limitaciones, como apilar el equipaje para que las maletas no se caigan del maletero, no se coloquen objetos pesados encima de los más ligeros y se eviten colisiones entre el brazo robótico y el parachoques del coche.
Desafíos de la manipulación de robots de varios pasos
Algunos métodos tradicionales abordan este problema de forma secuencial, adivinando una solución parcial que cumple una restricción a la vez y luego comprobando si se ha infringido alguna otra restricción.
Con una larga secuencia de acciones que realizar y una pila de equipaje que empacar, este proceso puede llevar mucho tiempo de manera poco práctica.
La solución: IA generativa para resolver problemas de manipulación de robots
Los investigadores del MIT utilizaron una forma de IA generativa, llamada modelo de difusión, para resolver este problema de manera más eficiente.
Su método utiliza una colección de modelos de aprendizaje automático, cada uno de los cuales está entrenado para representar un tipo específico de restricción. Estos modelos se combinan para generar soluciones globales al problema del embalaje, teniendo en cuenta todas las restricciones a la vez.

Resultados prometedores
Su método fue capaz de generar soluciones efectivas más rápido que otras técnicas, y produjo un mayor número de soluciones exitosas en la misma cantidad de tiempo.
Es importante destacar que su técnica también fue capaz de resolver problemas con combinaciones novedosas de restricciones y un mayor número de objetos, que los modelos no vieron durante el entrenamiento.
Debido a esta generalización, su técnica se puede utilizar para enseñar a los robots cómo comprender y cumplir con las limitaciones generales de los problemas de empaque, como la importancia de evitar colisiones o el deseo de que un objeto esté al lado de otro objeto.
Los robots entrenados de esta manera podrían aplicarse a una amplia gama de tareas complejas en diversos entornos, desde el cumplimiento de pedidos en un almacén hasta la organización de una estantería en la casa de alguien.
El proceso de Diffusion-CCSP
Para Diffusion-CCSP, los investigadores querían capturar la interconexión de las restricciones. En el empaquetado, por ejemplo, una restricción puede requerir que un determinado objeto esté al lado de otro objeto, mientras que una segunda restricción puede especificar dónde debe ubicarse uno de esos objetos.
Diffusion-CCSP aprende una familia de modelos de difusión, con uno para cada tipo de restricción. Los modelos se entrenan juntos, por lo que comparten algunos conocimientos, como la geometría de los objetos que se van a empaquetar. A continuación, los modelos trabajan juntos para encontrar soluciones que satisfagan conjuntamente las restricciones.
Avances y aplicaciones futuras
En el futuro, los investigadores planean probar Diffusion-CCSP en situaciones más complicadas, como con robots que pueden moverse por una habitación. También quieren permitir que Diffusion-CCSP aborde problemas en diferentes dominios sin la necesidad de volver a capacitarse con nuevos datos.
Esta innovadora técnica de aprendizaje automático promete impulsar la eficiencia y la capacidad de los robots para abordar tareas complejas en una variedad de entornos.
Además, su generalización a nuevas situaciones lo convierte en una herramienta versátil en la robótica y la automatización.
Este proyecto de investigación fue posible gracias a la financiación de diversas organizaciones, lo que destaca la importancia de colaboraciones interdisciplinarias para impulsar la robótica y la inteligencia artificial.
Con información de MIT
Tagged in :
Más entradas

Wacom impulsa a Blender con gran donación
.
El fabricante japonés de tabletas gráficas Wacom ha dado un paso decisivo en el impulso del software de creación 3D de…

Nano Banana: Nueva forma en edición de imágenes de Google
.
Google ha dado un paso adelante en la edición de imágenes con IA gracias al lanzamiento de Gemini 2.5 Flash Image,…
Actuadores flexibles dan agilidad a los robots insecto
.
Los robots insecto representan una alternativa para tareas de búsqueda y rescate, así como para la inspección de infraestructuras.