¡Tu carrito está actualmente vacío!

Hecho con una máquina de tejer estándar, RobotSweaters se puede utilizar para la detección táctil e incluso sistemas de control portátiles.
Investigadores de la Universidad Carnegie Mellon y la Universidad de California en Santa Bárbara han ideado una manera fácil de dar a los robots «piel» táctil: tejiéndolos «RobotSweaters» en máquinas de tejer industriales.
«Las máquinas de tejer pueden modelar el hilo en formas que no son planas, que pueden ser curvas o grumosas», explica James McCann, profesor asistente de la Escuela de Ciencias de la Computación de Carnegie Mellon y coautor del artículo que detalla el concepto RobotSuter.
«Eso nos hizo pensar que tal vez podríamos hacer sensores que encajaran sobre robots curvos o grumosos».
«Podemos usar [el RobotSweater] para hacer que el robot sea más inteligente durante su interacción con los humanos», explica Changliu Liu, profesor asistente de robótica en el SCS de Carnegie Mellon.
«Con RobotSweater, todo el cuerpo del robot puede cubrirse, por lo que puede detectar cualquier posible colisión».
¿Cómo funciona los RobotSweaters?
Los RobotSweaters son sorprendentemente simples de fabricar, ya que se basan en solo dos capas de hilo conductor rayado que intercala una capa de aislamiento similar a un encaje.
Cuando se aplica presión, se completa el circuito entre las capas superior e inferior, lo que desencadena una entrada en el robot.

«La fuerza empuja juntas las filas y columnas para cerrar la conexión», explica Wenzhen Yuan, profesor asistente, director del laboratorio RoboTouch de Carnegie Mellon y autor correspondiente del artículo.
«Si hay una fuerza a través de las rayas conductoras, las capas se pondrían en contacto entre sí a través de los agujeros».
Conectado a un microcontrolador Arduino Nano a través de sujetadores a presión, el RobotSweater puede detectar no solo cuando está siendo tocado por la distribución, la forma y la fuerza de cualquier contacto, con mayor precisión que los enfoques rivales basados en la visión.
Para probar el concepto, el grupo de investigadores equipó un par de robots con las prendas sensibles a la presión para proporcionar un control basado en el tacto, moviendo la cabeza de un robot en función del tacto y permitiendo que un brazo robótico se empuje fuera del camino o que su pinza se abra y cierre en función del agarre del operador.
El trabajo del equipo está disponible en el archivo de preimpresión arXiv de la Universidad de Cornell bajo términos de acceso abierto.
Con información de hackster.io.
Tagged in :
Más entradas

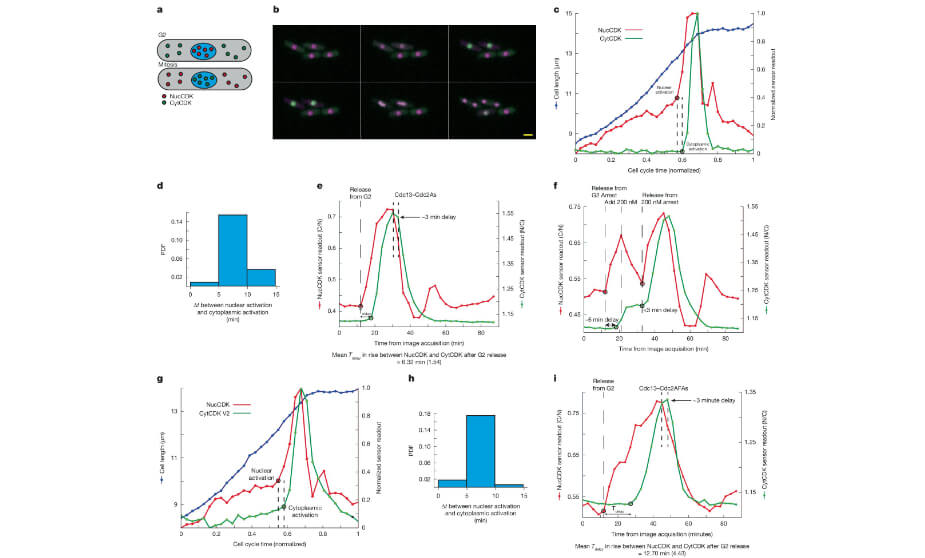
El marcapasos celular está en el núcleo, no fuera de él
.
Investigadores del Instituto Francis Crick demostraron que el «marcapasos» que regula la división celular, se encuentra dentro del núcleo.
Gemini CLI: Inteligencia artificial en la terminal
.
Gemini CLI es una nueva herramienta de código abierto que lleva el poder de Gemini directamente al terminal de los desarrolladores.
Nueva RTX 5050: potencia accesible con trazado de rayos
.
Nvidia anunció la llegada de la nueva tarjeta gráfica GeForce RTX 5050, una solución accesible tanto para sobremesa como para portátiles.