¡Tu carrito está actualmente vacío!
Los robots con patas tienen un inmenso potencial para explorar terrenos complejos y espacios confinados, inalcanzables para plataformas tradicionales.
Su capacidad de seleccionar puntos de apoyo y ajustar la postura corporal les permite desplazarse de manera eficiente en ambientes desafiantes.
No obstante, llevar esta tecnología a aplicaciones reales aún presenta dificultades significativas.
Los científicos de la ETH Zurich presentan una investigación para el control de robots de locomoción con patas mediante el uso de aprendizaje por refuerzo y representaciones 3D volumétricas.
El objetivo es lograr una locomoción robusta y versátil en entornos confinados y no estructurados.
Para este estudio, se utiliza una estructura jerárquica de políticas de control, combinando políticas de bajo nivel para seguir comandos en 6D con una política de alto nivel que aporta conciencia espacial tridimensional.
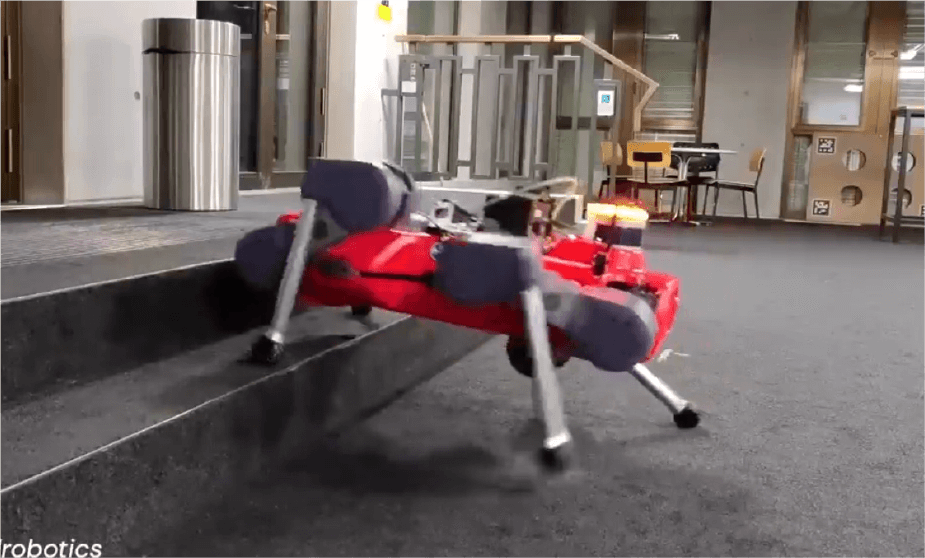
Este método ha sido evaluado tanto en simulaciones como en entornos reales, demostrando su efectividad para controlar un robot cuadrúpedo en terrenos accidentados.
Método de los robots en espacios confinados
El enfoque propuesto consiste en una configuración de dos capas.
La política de bajo nivel se encarga de seguir comandos en 6D que incluyen velocidad y postura del cuerpo en terreno accidentado.
Por otro lado, la política de alto nivel entrena al robot para moverse en espacios confinados, dándole comandos a la política de bajo nivel.
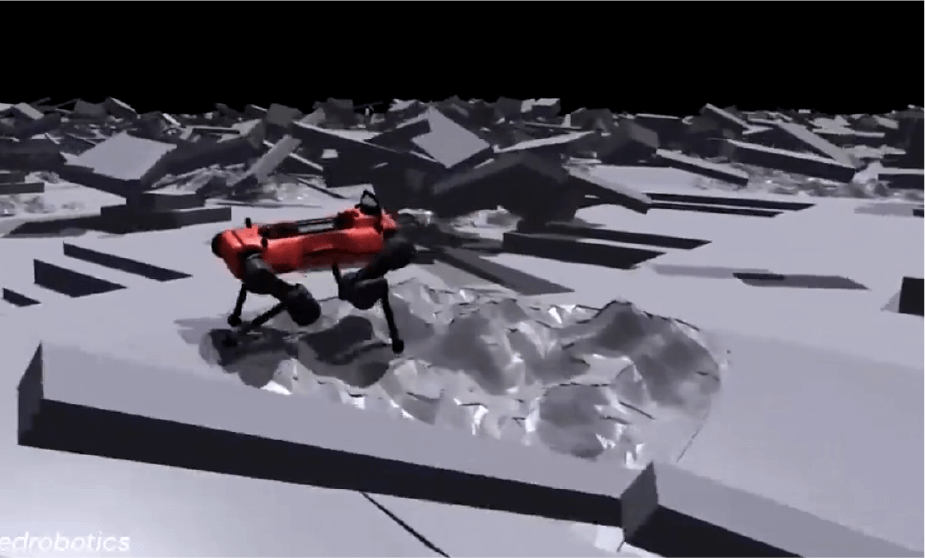
Todo esto se desarrolla en un entorno simulado, generado de manera procedimental para imitar diferentes escenarios.
Capacitación en políticas de bajo nivel
El aprendizaje de refuerzo se utiliza para entrenar la política de locomoción de bajo nivel, que sigue un conjunto de comandos en 6D, mejorando la capacidad del robot para caminar sobre superficies irregulares y accidentadas.
Generación de terreno procedimental
Para entrenar al robot en distintos entornos, se ha desarrollado un generador de terreno procedimental de código abierto, basado en el método de colapso de función de onda (WFC), ampliamente utilizado en el desarrollo de videojuegos.
Formación de políticas de alto nivel
Finalmente, se entrena una política de alto nivel, que guía la locomoción del robot utilizando escaneos tridimensionales y entradas de vóxeles ruidosos para detectar y sortear obstáculos.
Tagged in :
Más entradas

IA y NASA: Predicción de eventos solares
.
La inteligencia artificial ayuda a predecir eventos solares y proteger satélites de posibles interrupciones.

Google renueva Play Store con IA y nuevas funciones
.
Google anunció una importante actualización de su Play Store, orientada a mejorar la interacción de sus más de 4 mil millones…

Meta lanza Hyperscape convirtiendo espacios en mundos virtuales
.
En Meta Connect, la compañía de Mark Zuckerberg presentó varias actualizaciones sobre el metaverso, resaltando el lanzamiento de Hyperscape.